前回の記事M5Stack Atomで赤外線リモコンを作る(7)M5StickCに移植で作成したM5StickC用学習リモコンプログラムをM5Stackに移植してみました。
プログラムの変更
主な変更ポイントは次の通りです。
- <M5StickC.h>の代わりに<M5Stack.h>をinclude
- 赤外線LEDのGPIOピン番号を21に変更
- 赤外線受信センサーのGPIOピン番号を22に変更
変更後のプログラムはこうなりました。
#include <M5Stack.h>
//=== IRremoteESP8266 files
#include <IRrecv.h>
#include <IRremoteESP8266.h>
#include <IRac.h>
#include <IRtext.h>
#include <IRutils.h>
//=== SPIFFS files
#include "FS.h"
#include "SPIFFS.h"
#define IR_LED 21 // IR_LED in M5Stack IR UNIT
// ============ IRremoteESP8266 Tunable Parameters ================
const uint16_t kRecvPin = 22;
const uint32_t kBaudRate = 115200;
const uint16_t kCaptureBufferSize = 1024;
#if DECODE_AC
const uint8_t kTimeout = 50;
#else // DECODE_AC
const uint8_t kTimeout = 15;
#endif // DECODE_AC
const uint16_t kMinUnknownSize = 12;
#define LEGACY_TIMING_INFO false
//=== SPIFFS parameters
#define FORMAT_SPIFFS_IF_FAILED true
const char *FILE_NAME = "/irdata";
//== instances for receiving and sending IR messages
IRrecv irrecv(kRecvPin, kCaptureBufferSize, kTimeout, true);
decode_results results; // Somewhere to store the results
IRsend irsend(IR_LED);
//== IR message container
#define BUFFER_SIZE 1024
uint16_t rawData[BUFFER_SIZE]; // IR message container
uint16_t dataLength = 0; // IR message length
//== variable for remembering mode
bool receiving = false;
void setup() {
M5.begin(true, true, true); //LCDEnable = true, PowerEnable = true, SerialEnable = true
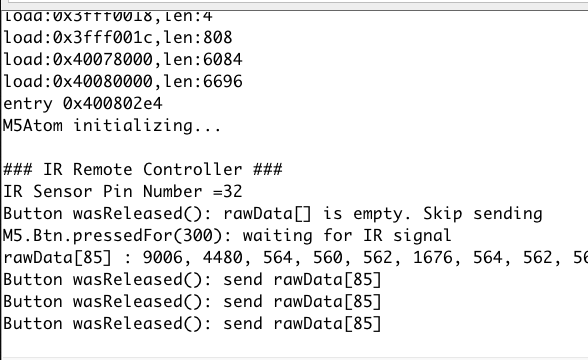
Serial.printf("\n\n### IR Remote Controller ###\n");
Serial.printf("IR Sensor Pin Number =%d \n", kRecvPin);
irrecv.setUnknownThreshold(kMinUnknownSize);
irsend.begin();
Serial.print("Initializeing SPIFFS....");
showMessage("INITIALIZING");
SPIFFS.begin(FORMAT_SPIFFS_IF_FAILED); // activate SPIFFS
Serial.println("Done.");
readRawDataFromSPIFFS(); // read data if available
showStatus();
}
void loop() {
M5.update();
if (M5.BtnA.wasReleased()) {
Serial.print("Button wasReleased(): ");
if (receiving) {
irrecv.disableIRIn();
receiving = false;
deleteRawDataInSPIFFS();
dataLength = 0;
showStatus();
} else if (dataLength > 0) {
Serial.printf("send rawData[%d]\n", dataLength);
irsend.sendRaw(rawData, dataLength, 38);
} else {
Serial.println("rawData[] is empty. Skip sending");
}
} else if (M5.BtnA.pressedFor(300)) { // 長押しなら赤外線信号を受信モードに遷移し、↓(下矢印)を表示
irrecv.enableIRIn();
receiving = true;
Serial.println("M5.Btn.pressedFor(500): waiting for IR signal");
showStatus();
while (! M5.BtnA.wasReleased()) { // ボタンが離されるまで待つ
delay(50);
M5.update();
}
} else { // 赤外線信号を受信していたら、信号を配列に格納し、○を表示する。
if (irrecv.decode(&results)) {
uint16_t *rawData_tmp;
irrecv.disableIRIn();
receiving = false;
if (results.overflow)
Serial.printf(D_WARN_BUFFERFULL "\n", kCaptureBufferSize);
rawData_tmp = resultToRawArray(&results);
dataLength = getCorrectedRawLength(&results);
Serial.printf("rawData[%d] : ", dataLength);
for (int i = 0; i < dataLength; i++) {
rawData[i] = rawData_tmp[i];
Serial.printf("%d, ", rawData[i]);
}
delete[] rawData_tmp;
Serial.println();
writeRawDataToSPIFFS();
showStatus();
}
}
}
void readRawDataFromSPIFFS() {
Serial.printf("reading rawData from SPIFF file: %s \n", FILE_NAME);
fs::FS fs = SPIFFS;
File file;
if (fs.exists(FILE_NAME)) {
file = fs.open(FILE_NAME);
} else {
Serial.printf("file \"%s\" not found in SPIFFS\n", FILE_NAME);
return;
}
int i = 0;
uint8_t *rawData8 = (uint8_t *)rawData;
while (file.available()) {
rawData8[i] = file.read();
Serial.printf("%d ", rawData8[i]);
i++;
}
Serial.println();
dataLength = i / 2;
file.close();
Serial.printf("dataLength = %d\n", dataLength);
for (int j = 0; j < dataLength; j++) {
Serial.printf("%d", rawData[j]);
Serial.print(" ");
}
Serial.println("done");
}
void writeRawDataToSPIFFS() {
fs::FS fs = SPIFFS;
Serial.println("writing data to SPIFF");
File file = fs.open(FILE_NAME, FILE_WRITE);
file.write((uint8_t *)rawData, dataLength * 2);
file.close();
Serial.println("done");
}
void deleteRawDataInSPIFFS() {
Serial.printf("Deleting rawData in SPIFFS: %s\r\n", FILE_NAME);
fs::FS fs = SPIFFS;
if (fs.remove(FILE_NAME)) {
Serial.println("- file deleted");
} else {
Serial.println("- deletion failed");
}
}
void showStatus() {
const char *message;
if (receiving) {
message = "RECEIVING";
} else {
if (dataLength > 0) {
message = "READY";
} else {
message = "NO DATA";
}
}
showMessage(message);
}
void showMessage(const char *message) {
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setRotation(1);
M5.Lcd.setTextFont(4);
M5.Lcd.setTextColor(BLUE);
M5.Lcd.setCursor(27, 0);
M5.Lcd.print("IR Remote");
M5.Lcd.setCursor(27, 40);
M5.Lcd.print(message);
}